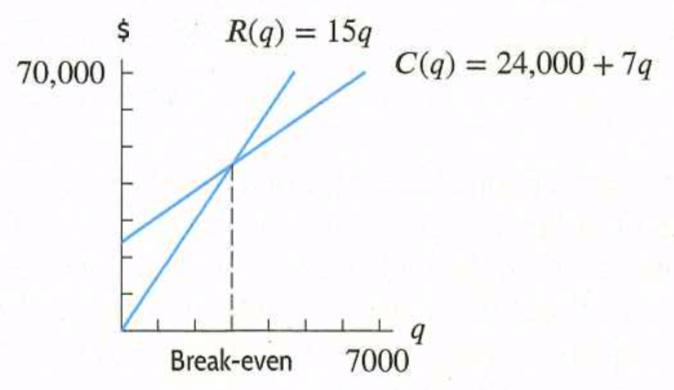
The company makes money whenever revenues are greater than costs, so we find the values of
\(q\) for which the graph of
\(R(q)\) lies above the graph of
\(C(q)\text{:}\)
We find the point at which the graph of \(R(q)\) and \(C(q)\) cross:
\begin{equation*}
\begin{aligned}\text{ Revenue } \amp = \text{ Cost } \\ 15q \amp = 24,000+7q\\ 8q \amp = 24,000\\ q \amp = 3000. \end{aligned}
\end{equation*}
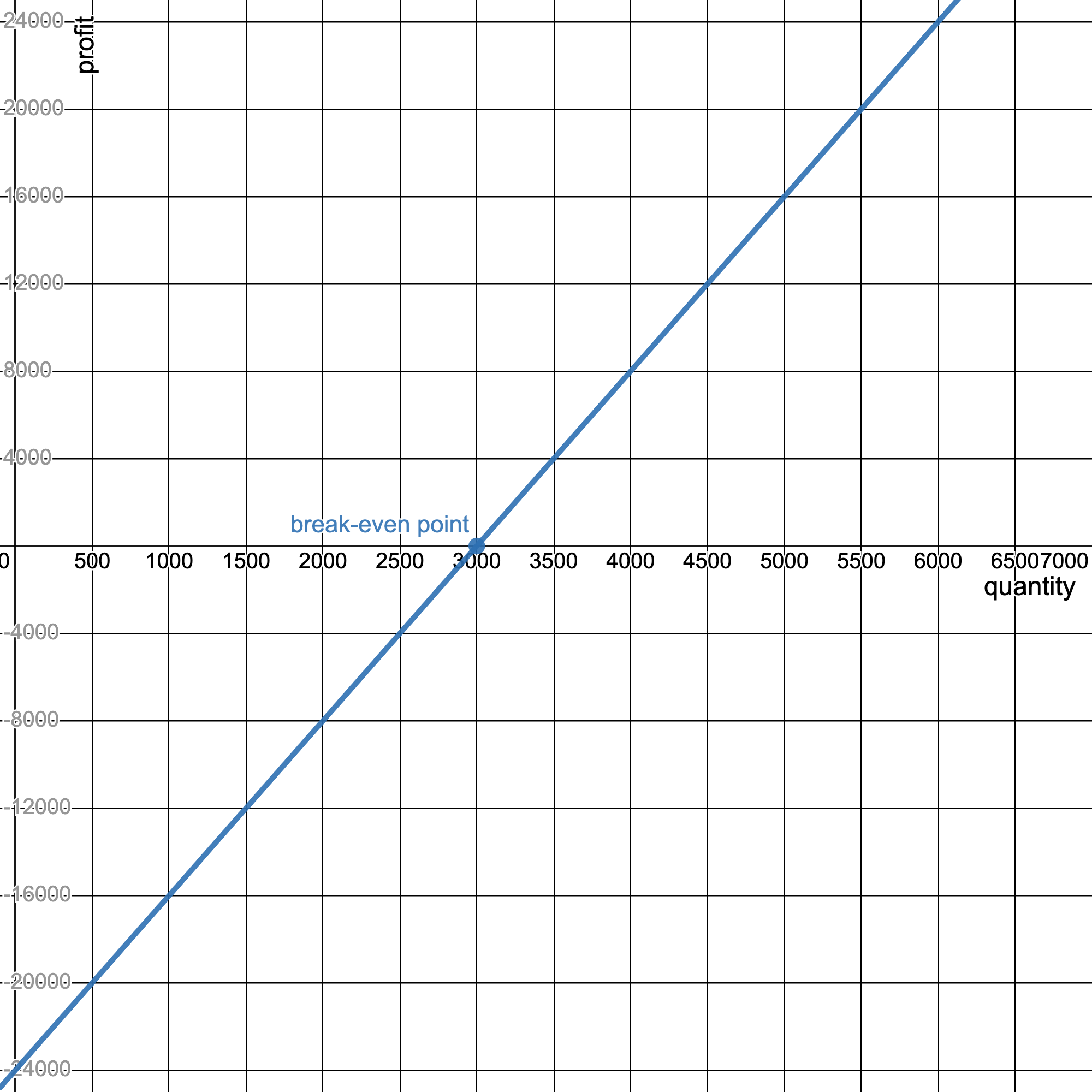
The company makes a profit if it produces and sells more than 3000 radios. The company loses money if it produces and sells fewer than 3000 radios.